核手提箱
海洋云增白
可扩展服务
蝉
policy
颈挂空调
计算机硬件
极端主义
PostgreSQL
AI工具
儿童读物
化学
即时消息
代码审查
反向工程
KDE
数据安全
效率工具
超级计算机
植物学
分析化学
插图
Three.js
泄露
大会
残疾人学校
初创
Verizon
海水淡化
加速器项目
更多
GLEWBOT:像壁虎一样攀爬建筑物以检查墙砖 (blog.arduino.cc)
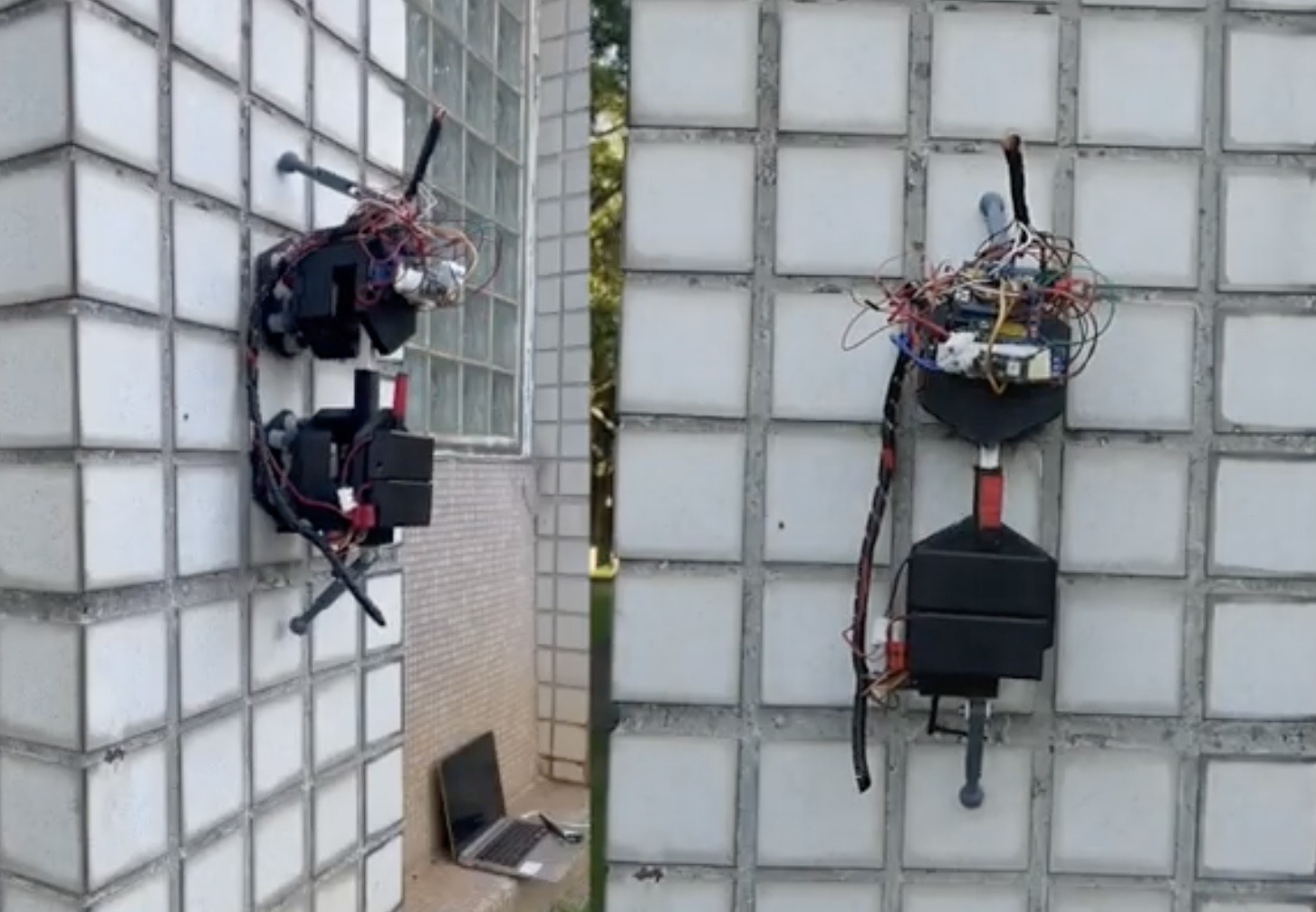
GLEWBOT是一款受壁虎启发,用于检查建筑物外墙砖的机器人。它采用类似攀岩者使用上升器的两部分设计,通过吸盘抓住瓷砖,并使用线性致动器进行伸展/收缩,从而攀爬墙壁。GLEWBOT配备了两个Arduino板,一个用于中央命令和一般功能,另一个用作声音识别模块并控制检查工具。该工具是一个空心鼓锤,敲击每个瓷砖并聆听产生的回声,通过音频分类模型识别有问题的瓷砖。
用 Arduino 搭建低成本电动车充电站 (blog.arduino.cc)

本网站展示了如何使用 Arduino 创建一个低成本的电动汽车充电站,该过程包括收集材料、组装硬件和配置软件。还讨论了安全注意事项和项目的优点。