搜索技巧
海洋云增白
开源地图
AI 搜索答案
沙丘魔堡2
压缩机站
自由职业
policy
小团队
颈挂空调
Chumby
个人电脑
极端主义
团队
PostgreSQL
AI工具
证券
DirectX
DrawingPics
化学
KDE
披萨农场
多动症
植物学
分析化学
Three.js
大会
残疾人学校
初创
QB64
更多
GLEWBOT:像壁虎一样攀爬建筑物以检查墙砖 (blog.arduino.cc)
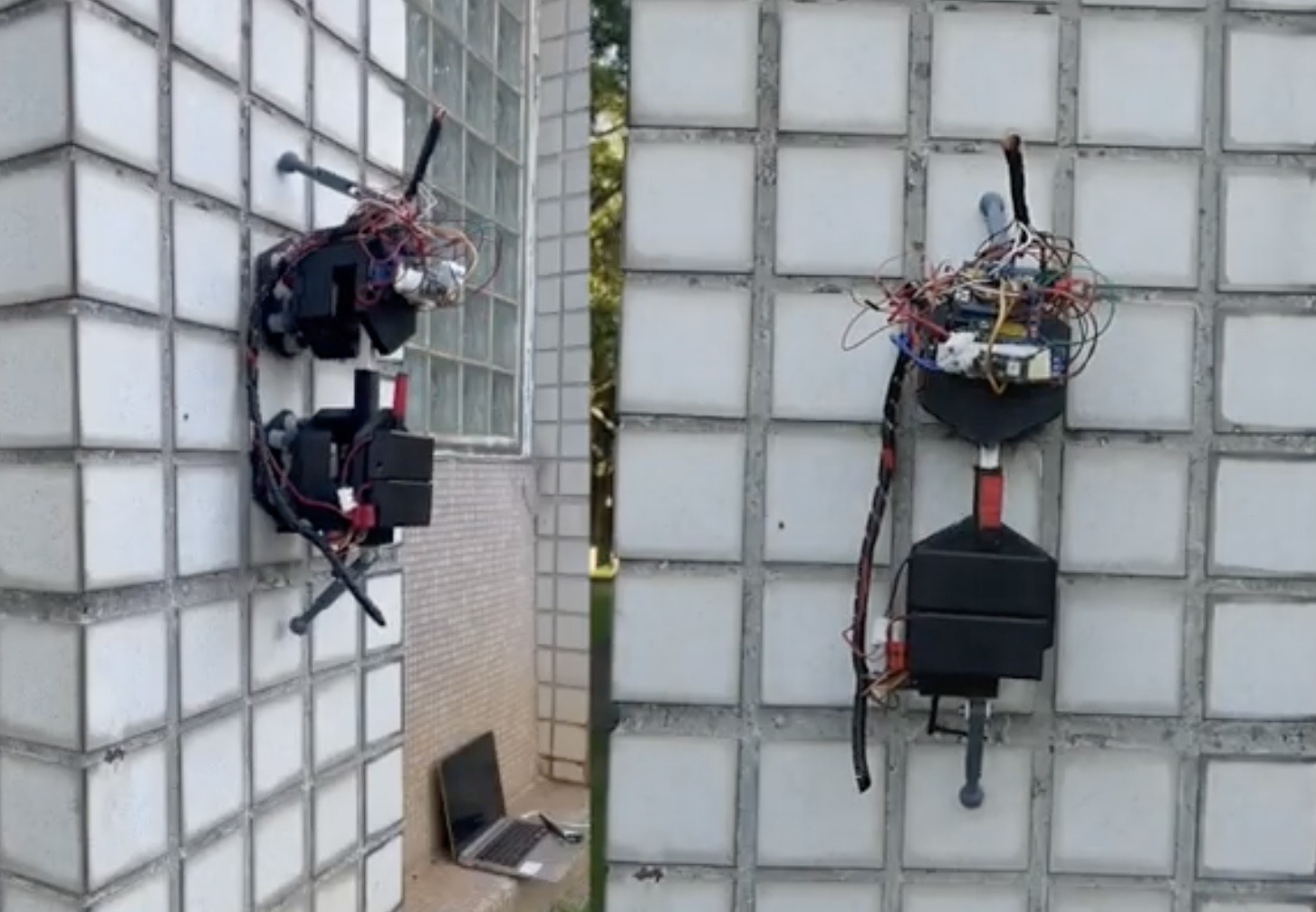
GLEWBOT是一款受壁虎启发,用于检查建筑物外墙砖的机器人。它采用类似攀岩者使用上升器的两部分设计,通过吸盘抓住瓷砖,并使用线性致动器进行伸展/收缩,从而攀爬墙壁。GLEWBOT配备了两个Arduino板,一个用于中央命令和一般功能,另一个用作声音识别模块并控制检查工具。该工具是一个空心鼓锤,敲击每个瓷砖并聆听产生的回声,通过音频分类模型识别有问题的瓷砖。
评论已经关闭!