MuJoCo Playground: Simplificando el Aprendizaje Robótico con un Framework de Código Abierto
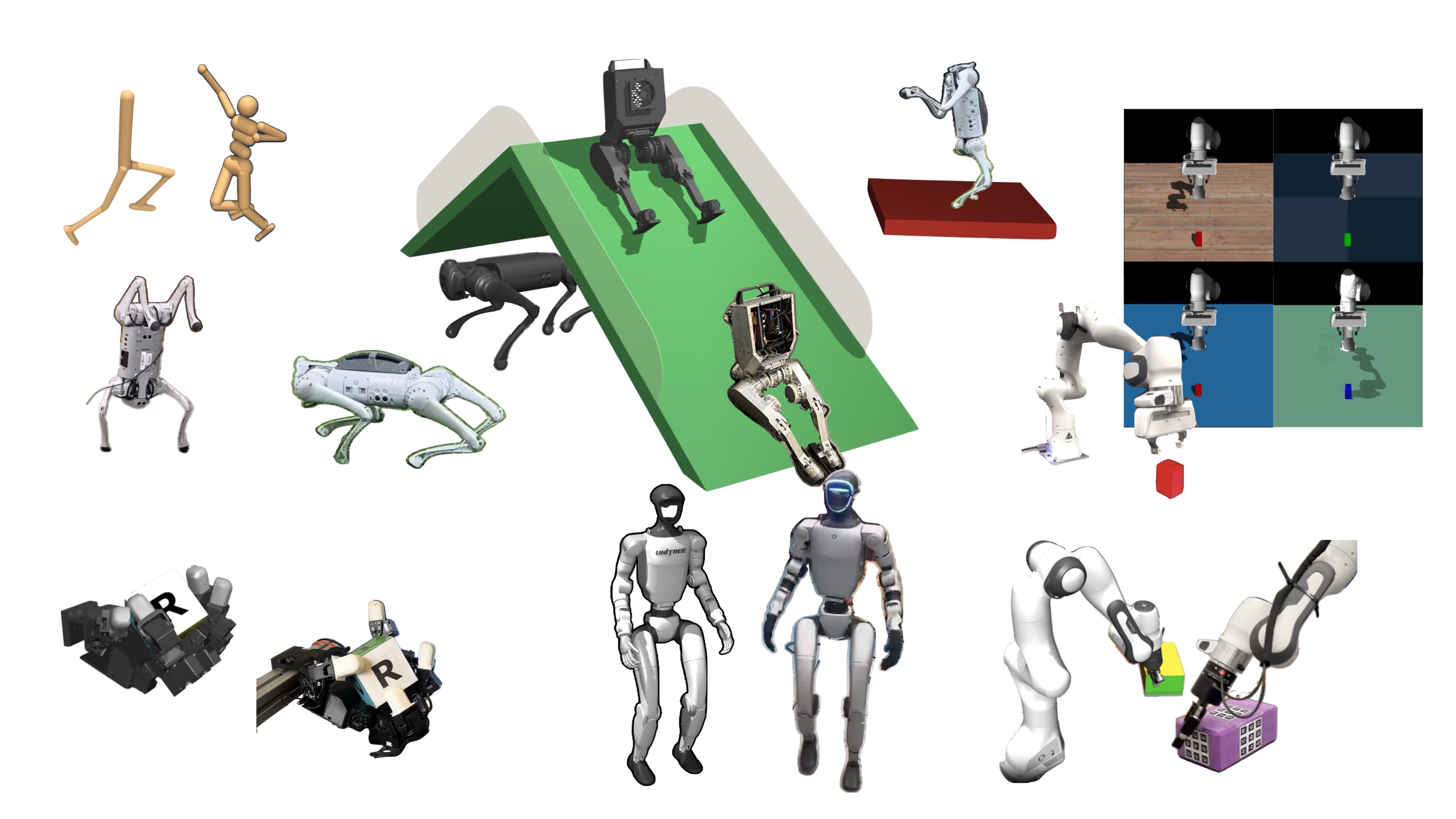
MuJoCo Playground es un framework completamente de código abierto para el aprendizaje robótico, construido con MJX, diseñado para simplificar la simulación, el entrenamiento y la transferencia de simulación a la realidad. Con una simple instalación (pip install playground), los investigadores pueden entrenar políticas en minutos en una sola GPU. Soporta diversas plataformas robóticas, incluyendo cuadrúpedos, humanoides, manos hábiles y brazos robóticos, y permite la transferencia simulación-a-realidad de cero-shot a partir de entradas de estado y píxeles. Esto se logra a través de una pila integrada que comprende un motor de física, un renderizador por lotes y entornos de entrenamiento. Desarrollado a través de un esfuerzo comunitario, MuJoCo Playground tiene como objetivo ser una herramienta valiosa para investigadores y desarrolladores.