ملعب MuJoCo: تبسيط تعلم الروبوتات باستخدام إطار عمل مفتوح المصدر
2025-01-16
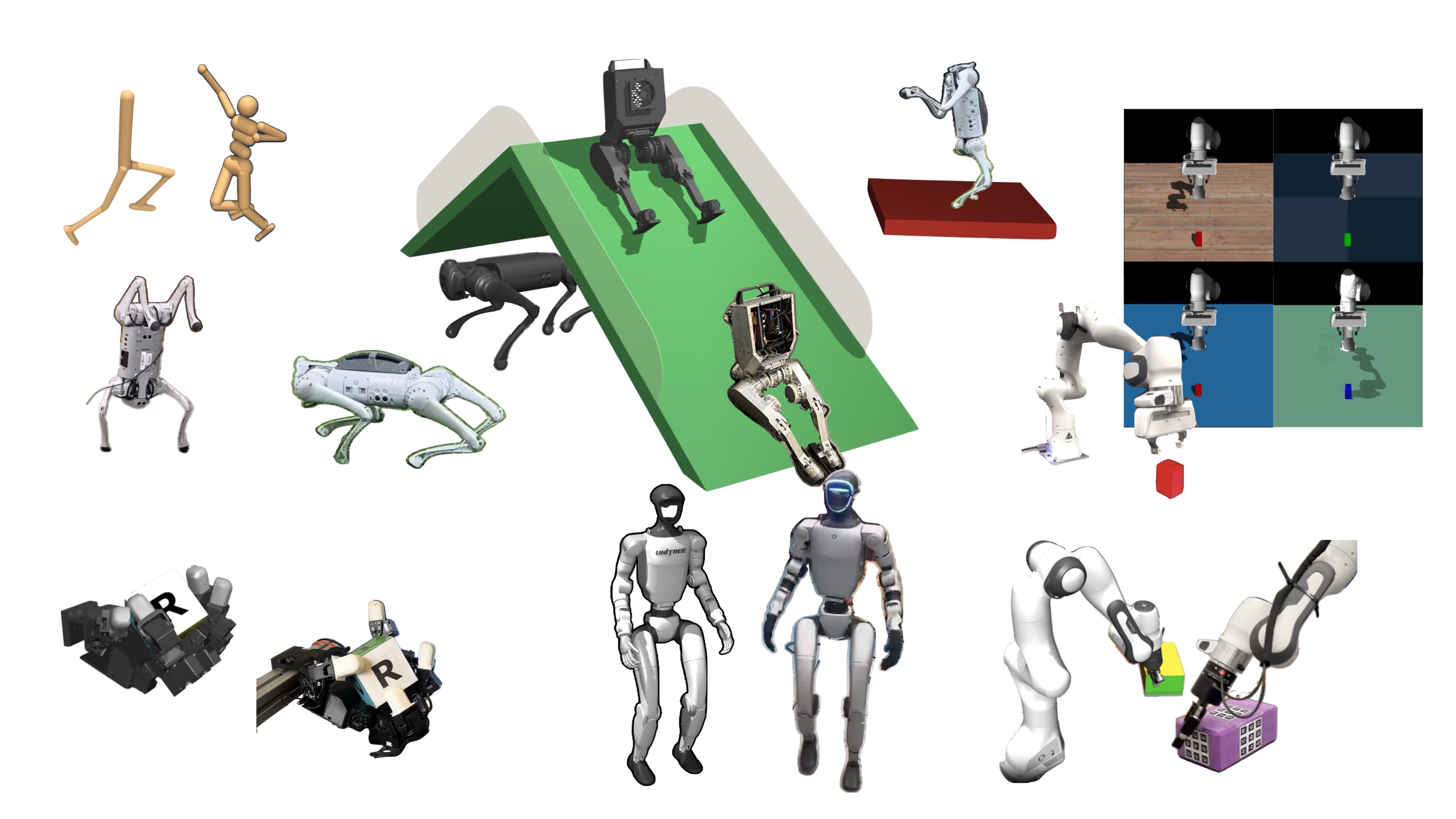
ملعب MuJoCo هو إطار عمل مفتوح المصدر بالكامل لتعلم الروبوتات، تم إنشاؤه باستخدام MJX، ويهدف إلى تبسيط المحاكاة والتدريب ونقل المحاكاة إلى الواقع. بإجراء تثبيت بسيط (pip install playground)، يمكن للباحثين تدريب السياسات في دقائق على وحدة معالجة رسوميات واحدة. يدعم منصات روبوتية متنوعة، بما في ذلك الروبوتات رباعية الأرجل، والروبوتات البشرية، واليدين البارعتين، والروبوتات ذات الأذرع، ويتيح نقلًا من المحاكاة إلى الواقع بدون أي تدريب مسبق من كل من مدخلات الحالة والبيكسل. يتم تحقيق ذلك من خلال مجموعة متكاملة تتضمن محرك فيزياء، ومرشح دفعات، وبيئات تدريب. تم تطوير ملعب MuJoCo من خلال جهد جماعي، ويهدف إلى أن يكون أداة قيّمة للباحثين والمطورين.
التطوير
تعلم الروبوتات