SPROUT: 도시 수색 및 구조를 위한 덩굴 로봇
2025-04-28
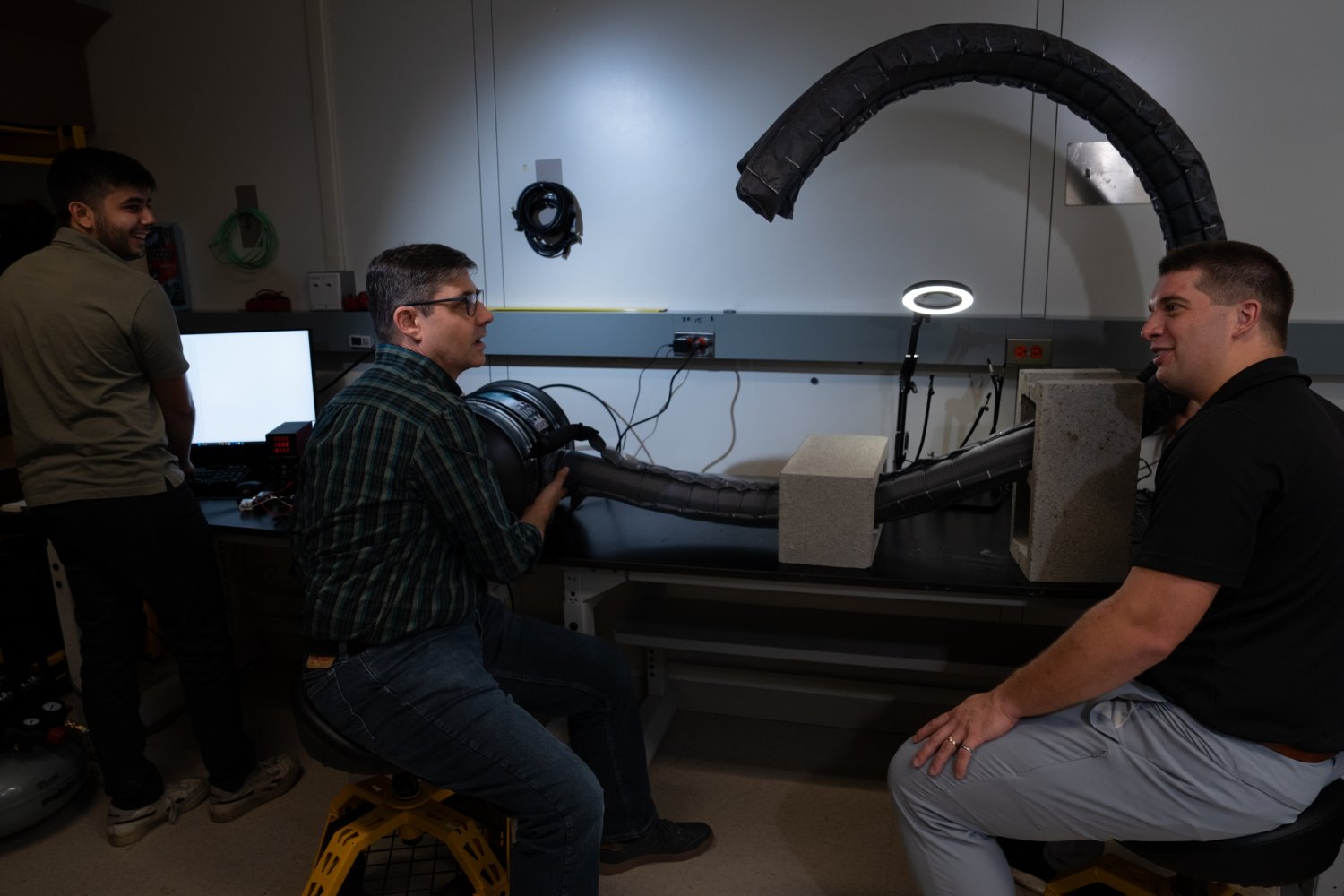
MIT 링컨 연구소와 노터데임 대학교는 붕괴된 건물 내부를 탐색하여 갇힌 사람들을 찾기 위한 덩굴 모양의 소프트 로봇인 SPROUT를 공동 개발했습니다. 공기로 부풀리는 튜브형 로봇인 SPROUT는 카메라와 센서를 장착하고 좁은 공간을 유연하게 이동하며 구조대원을 위해 환경 지도를 생성합니다. SPROUT는 현재의 수색 및 구조 기술의 한계를 해결하고 불안정한 환경을 탐색하기 위한 저렴하고 사용하기 쉬운 솔루션을 제공합니다. 향후 개발은 위험 감지 및 안전 평가를 개선하여 사람이 잔해 더미에 들어가기 전에 포괄적인 작전 상황을 제공하는 것을 목표로 합니다.