MuJoCo Playground : Simplifier l'apprentissage robotique grâce à un framework open source
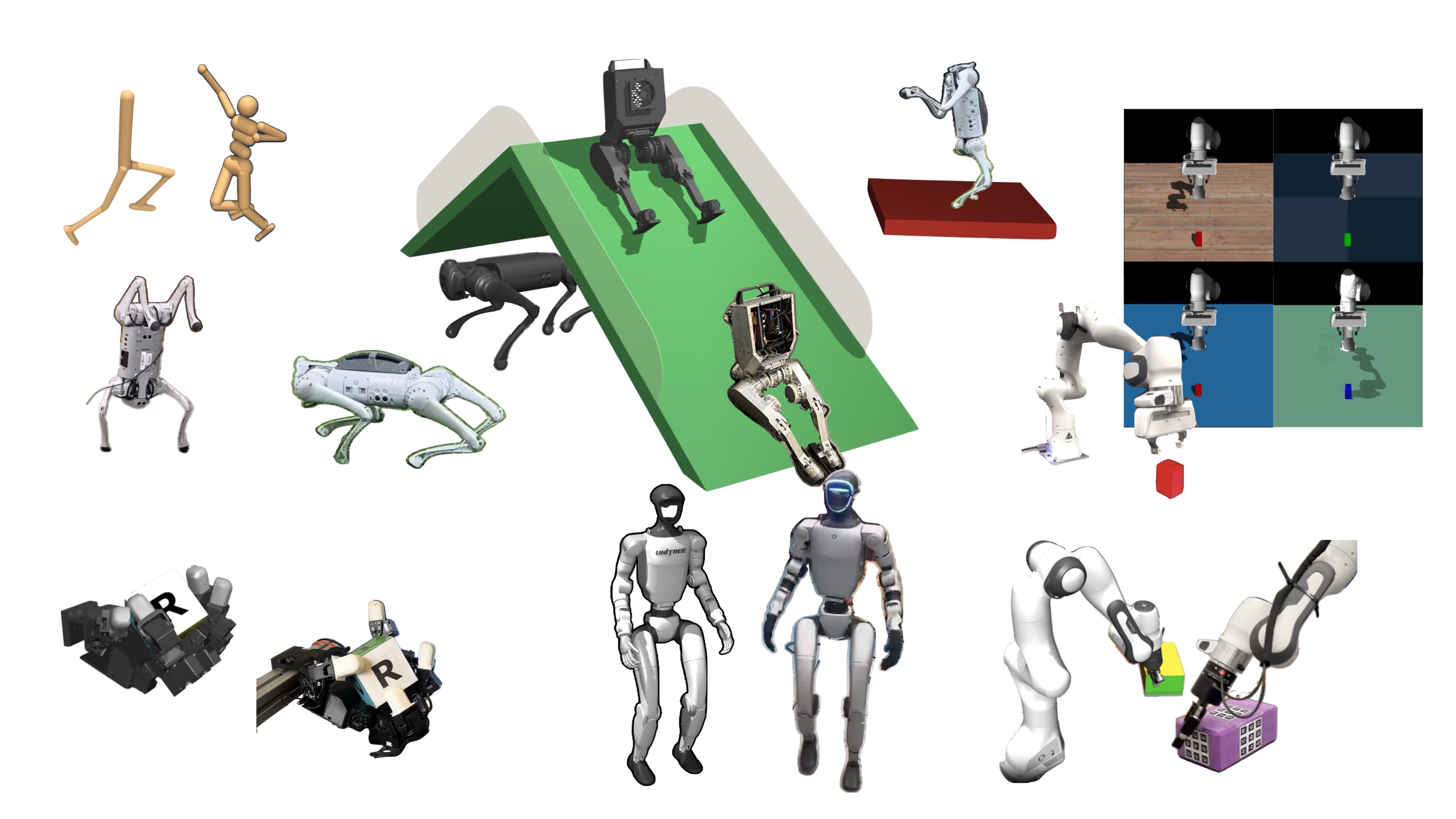
MuJoCo Playground est un framework entièrement open source pour l'apprentissage robotique, construit avec MJX, conçu pour simplifier la simulation, l'entraînement et le transfert de la simulation à la réalité. Avec une installation simple (pip install playground), les chercheurs peuvent entraîner des politiques en quelques minutes sur un seul GPU. Il prend en charge diverses plateformes robotiques, notamment les quadrupèdes, les humanoïdes, les mains dextres et les bras robotiques, et permet un transfert simulation-réalité zéro-shot à partir d'entrées d'état et de pixels. Ceci est réalisé grâce à une pile intégrée comprenant un moteur physique, un rendu par lots et des environnements d'entraînement. Développé grâce à un effort communautaire, MuJoCo Playground vise à être un outil précieux pour les chercheurs et les développeurs.