MuJoCo Playground: Streamlining Robot Learning with an Open-Source Framework
2025-01-16
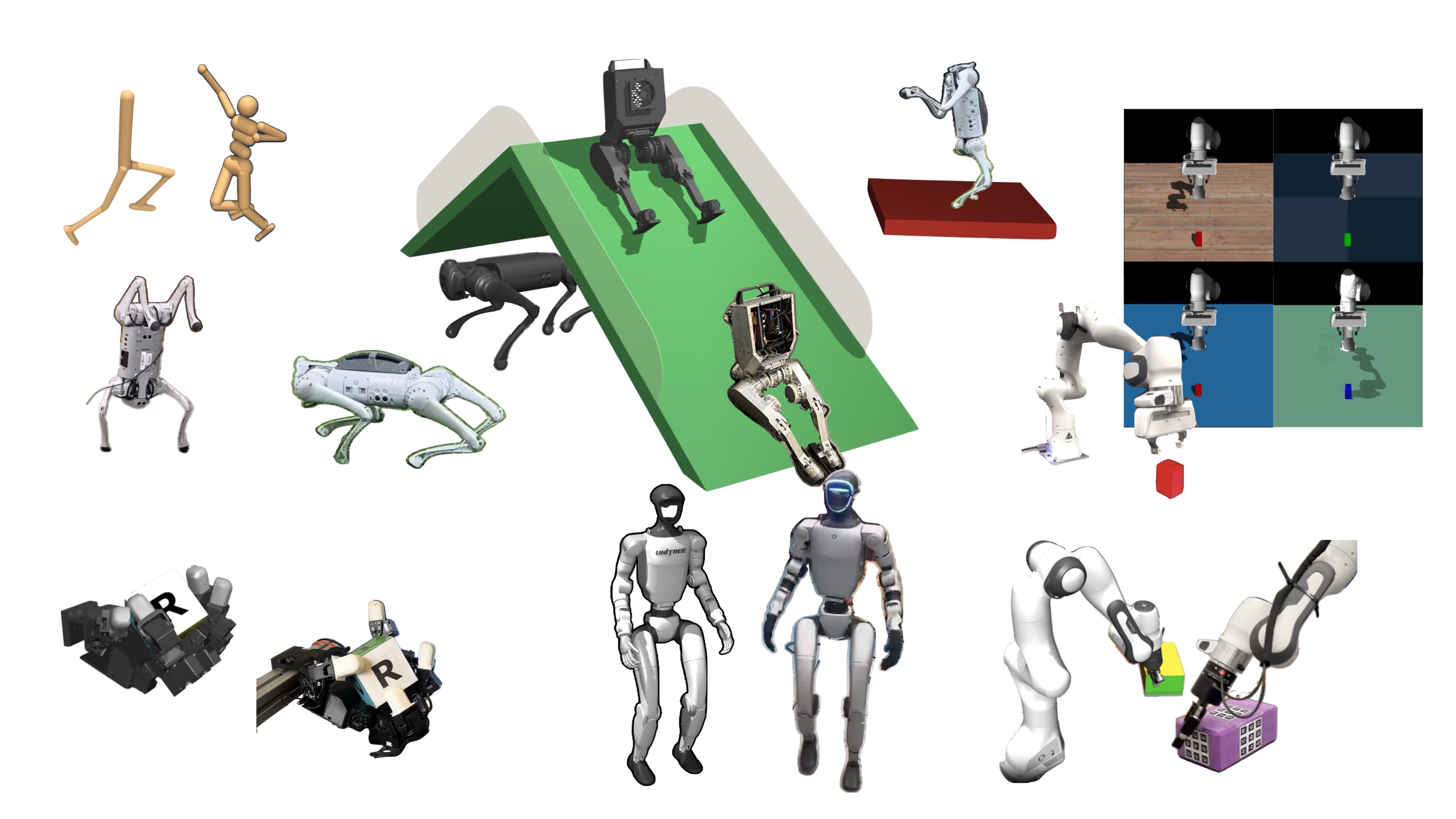
MuJoCo Playground is a fully open-source framework for robot learning built with MJX, designed to streamline simulation, training, and sim-to-real transfer. With a simple installation (pip install playground), researchers can train policies in minutes on a single GPU. It supports diverse robotic platforms, including quadrupeds, humanoids, dexterous hands, and robotic arms, and enables zero-shot sim-to-real transfer from both state and pixel inputs. This is achieved through an integrated stack comprising a physics engine, batch renderer, and training environments. Developed through a community effort, MuJoCo Playground aims to be a valuable tool for researchers and developers.
Development
robot learning