MuJoCo Playground:オープンソースフレームワークによるロボット学習の効率化
2025-01-16
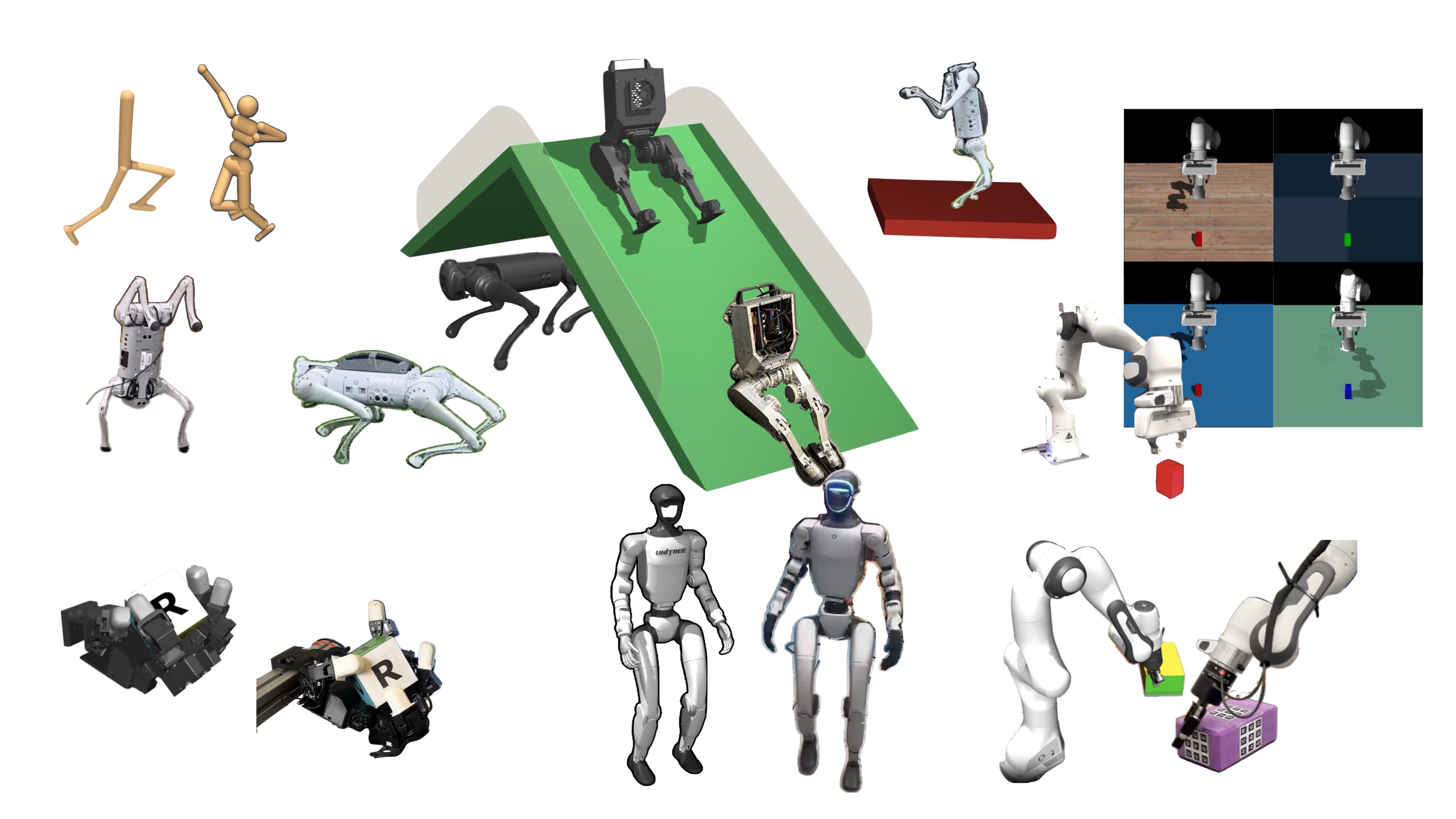
MuJoCo Playgroundは、MJXを使用して構築された、完全にオープンソースのロボット学習フレームワークであり、シミュレーション、トレーニング、シミュレーションから現実への転移を簡素化することを目的としています。簡単なインストール(pip install playground)で、研究者は単一のGPU上で数分でポリシーをトレーニングできます。四足歩行ロボット、ヒューマノイド、器用なハンド、ロボットアームなど、さまざまなロボットプラットフォームをサポートし、状態とピクセルの両方の入力からのゼロショットシミュレーションから現実への転移を可能にします。これは、物理エンジン、バッチレンダラー、トレーニング環境を備えた統合スタックによって実現されます。コミュニティの取り組みによって開発されたMuJoCo Playgroundは、研究者や開発者にとって貴重なツールとなることを目指しています。
開発
ロボット学習