MuJoCo Playground:简化机器人学习的开源框架
2025-01-16
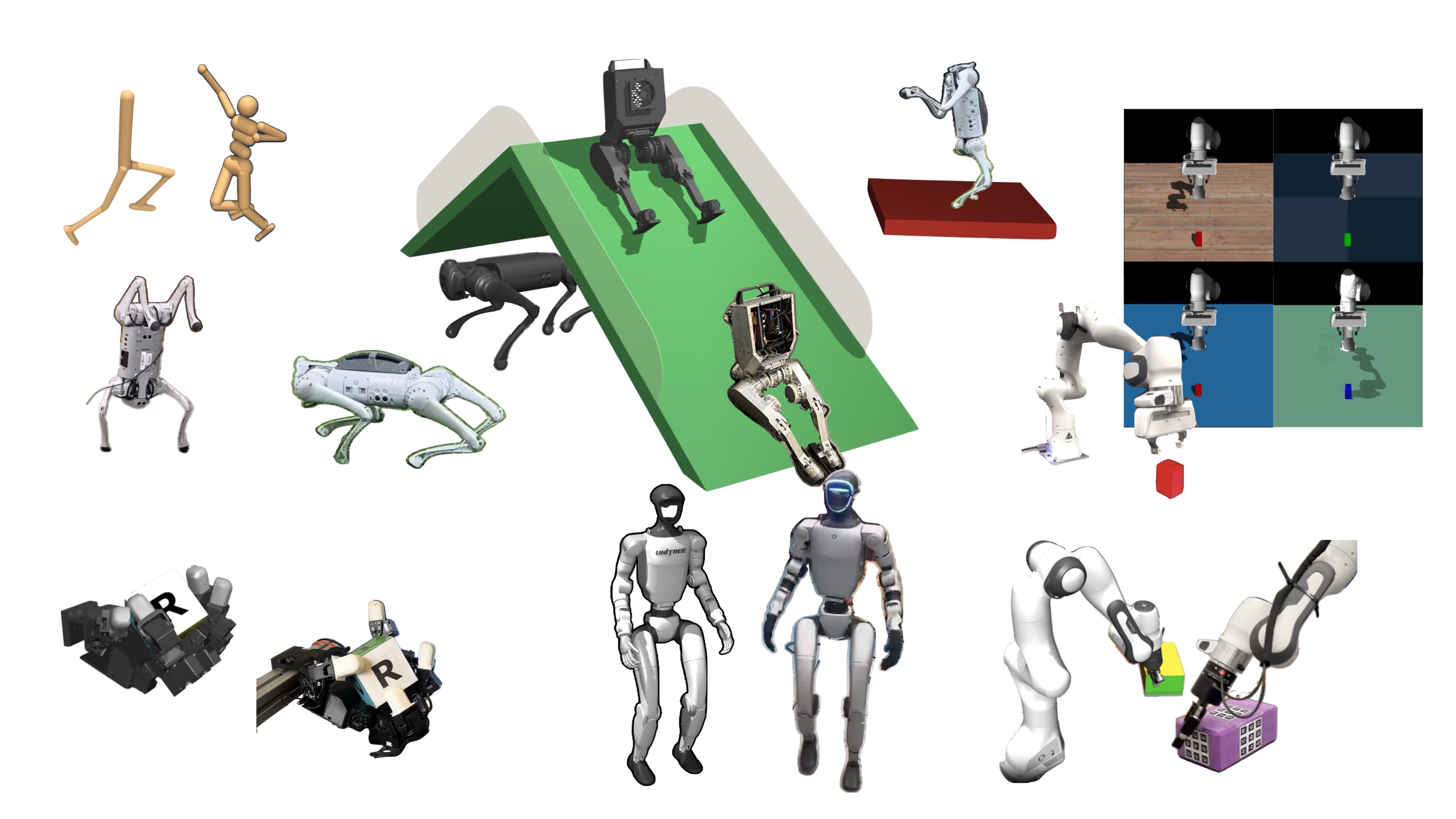
MuJoCo Playground是一个完全开源的机器人学习框架,基于MJX构建,旨在简化仿真、训练和从模拟到现实的转移。只需简单的安装(pip install playground),研究人员就能在单GPU上几分钟内训练策略。它支持多种机器人平台,包括四足机器人、人形机器人、灵巧手和机械臂,并支持基于状态和像素输入的零样本模拟到现实转移。这得益于其集成的物理引擎、批量渲染器和训练环境。MuJoCo Playground是社区的共同努力,希望它能为研究人员和开发者带来价值。