MuJoCo Playground: Simplificando o Aprendizado de Robôs com um Framework de Código Aberto
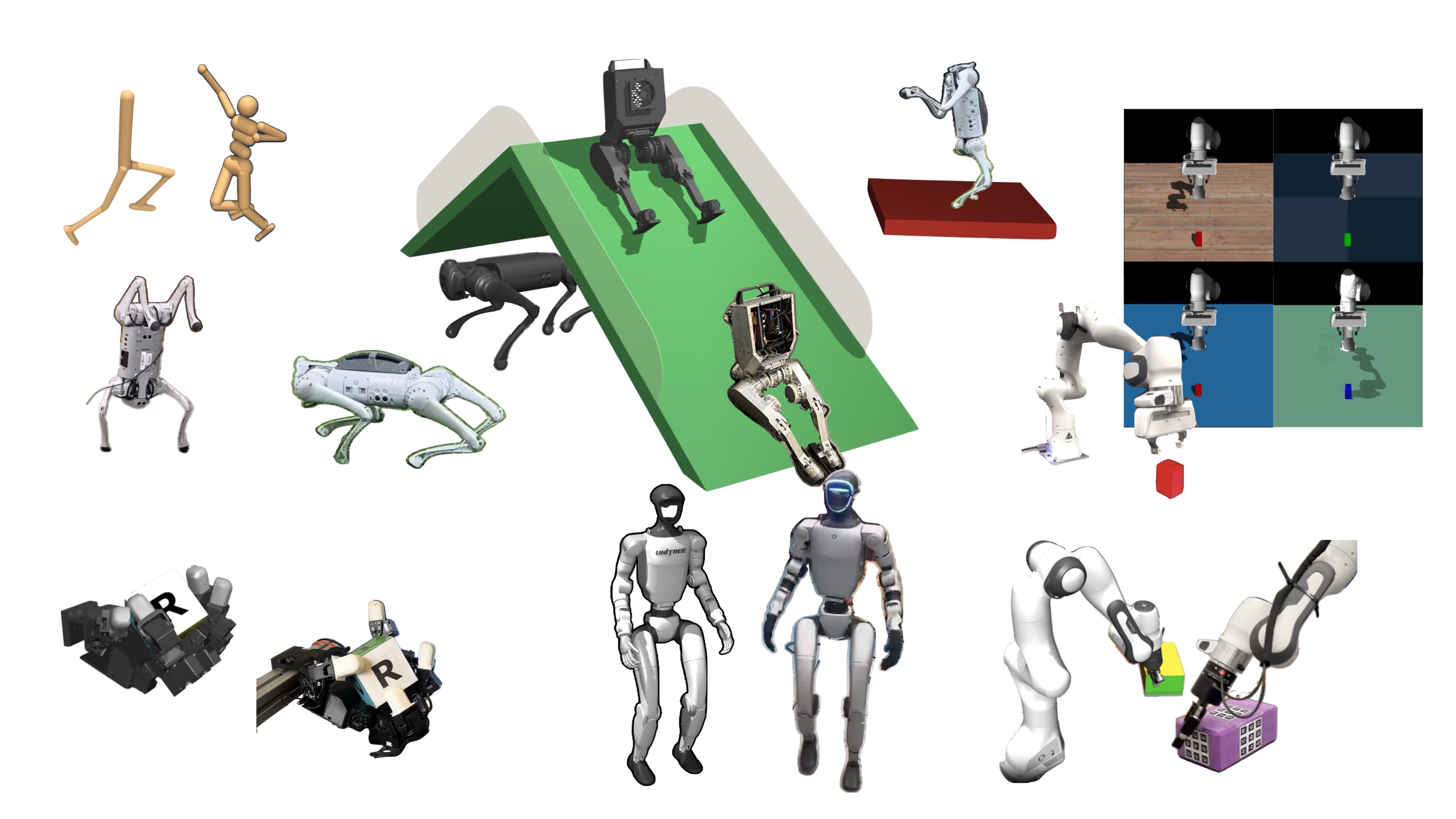
O MuJoCo Playground é uma estrutura totalmente de código aberto para aprendizado de robôs, construída com MJX, projetada para simplificar a simulação, o treinamento e a transferência de simulação para a realidade. Com uma instalação simples (pip install playground), os pesquisadores podem treinar políticas em minutos em uma única GPU. Ele suporta diversas plataformas robóticas, incluindo quadrúpedes, humanoides, mãos hábeis e braços robóticos, e permite a transferência de simulação para realidade de zero-shot a partir de entradas de estado e pixel. Isso é alcançado por meio de uma pilha integrada que compreende um mecanismo de física, um renderizador em lote e ambientes de treinamento. Desenvolvido por meio de um esforço comunitário, o MuJoCo Playground visa ser uma ferramenta valiosa para pesquisadores e desenvolvedores.