MuJoCo Playground: 오픈소스 프레임워크를 통한 로봇 학습 간소화
2025-01-16
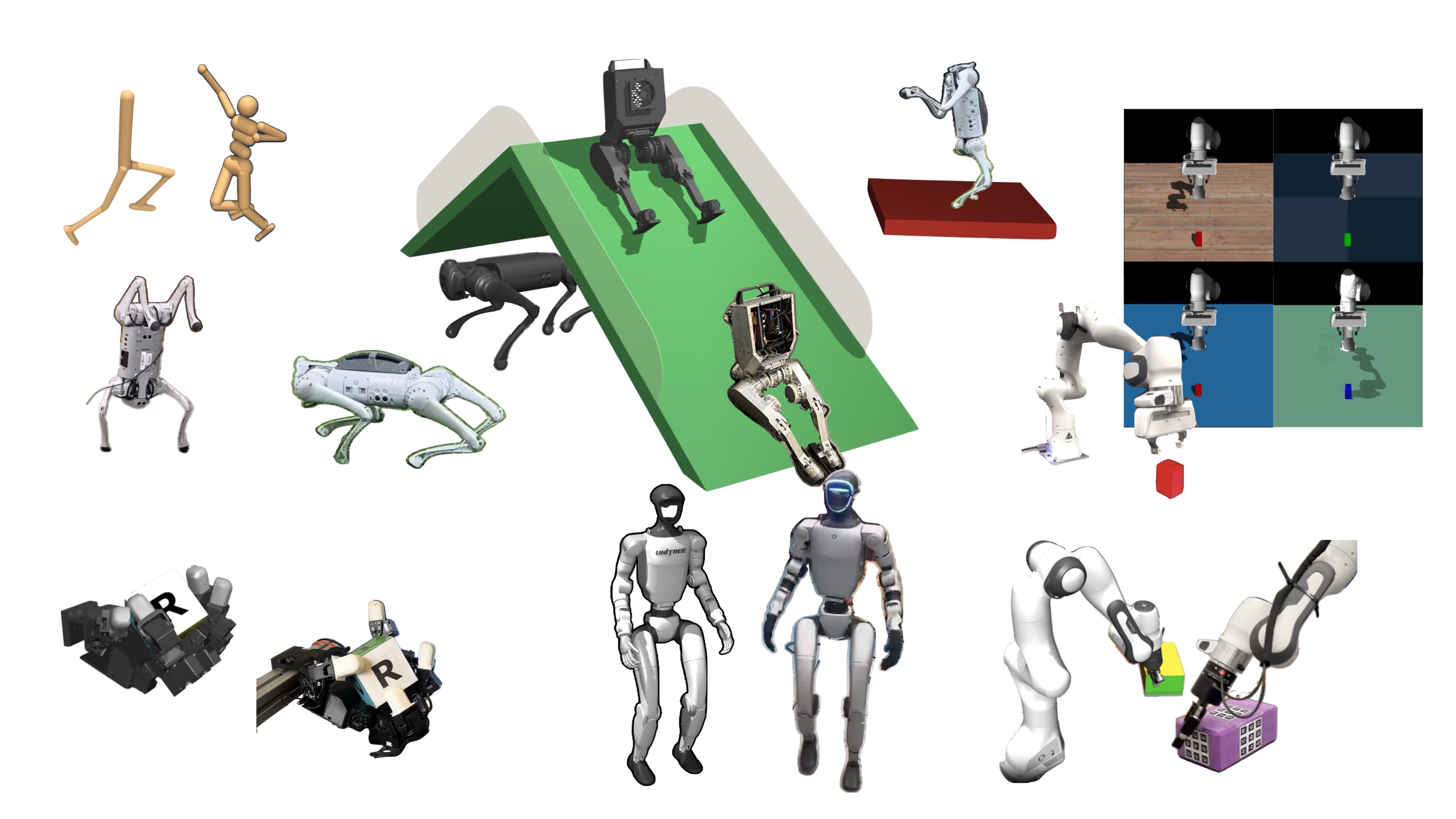
MuJoCo Playground는 MJX로 구축된 완전 오픈소스 로봇 학습 프레임워크로, 시뮬레이션, 훈련 및 시뮬레이션에서 실제로의 전환을 간소화하도록 설계되었습니다. 간단한 설치(pip install playground)를 통해 연구자는 단일 GPU에서 몇 분 만에 정책을 훈련할 수 있습니다. 네발 보행 로봇, 휴머노이드, 숙련된 손, 로봇 암 등 다양한 로봇 플랫폼을 지원하며, 상태 및 픽셀 입력 모두에서 제로샷 시뮬레이션-실제 전환을 가능하게 합니다. 물리 엔진, 배치 렌더러 및 훈련 환경으로 구성된 통합 스택을 통해 이를 달성합니다. 커뮤니티의 노력으로 개발된 MuJoCo Playground는 연구자와 개발자에게 귀중한 도구가 되는 것을 목표로 합니다.
개발
로봇 학습