MuJoCo Playground: Vereinfachung des Roboterlernens mit einem Open-Source-Framework
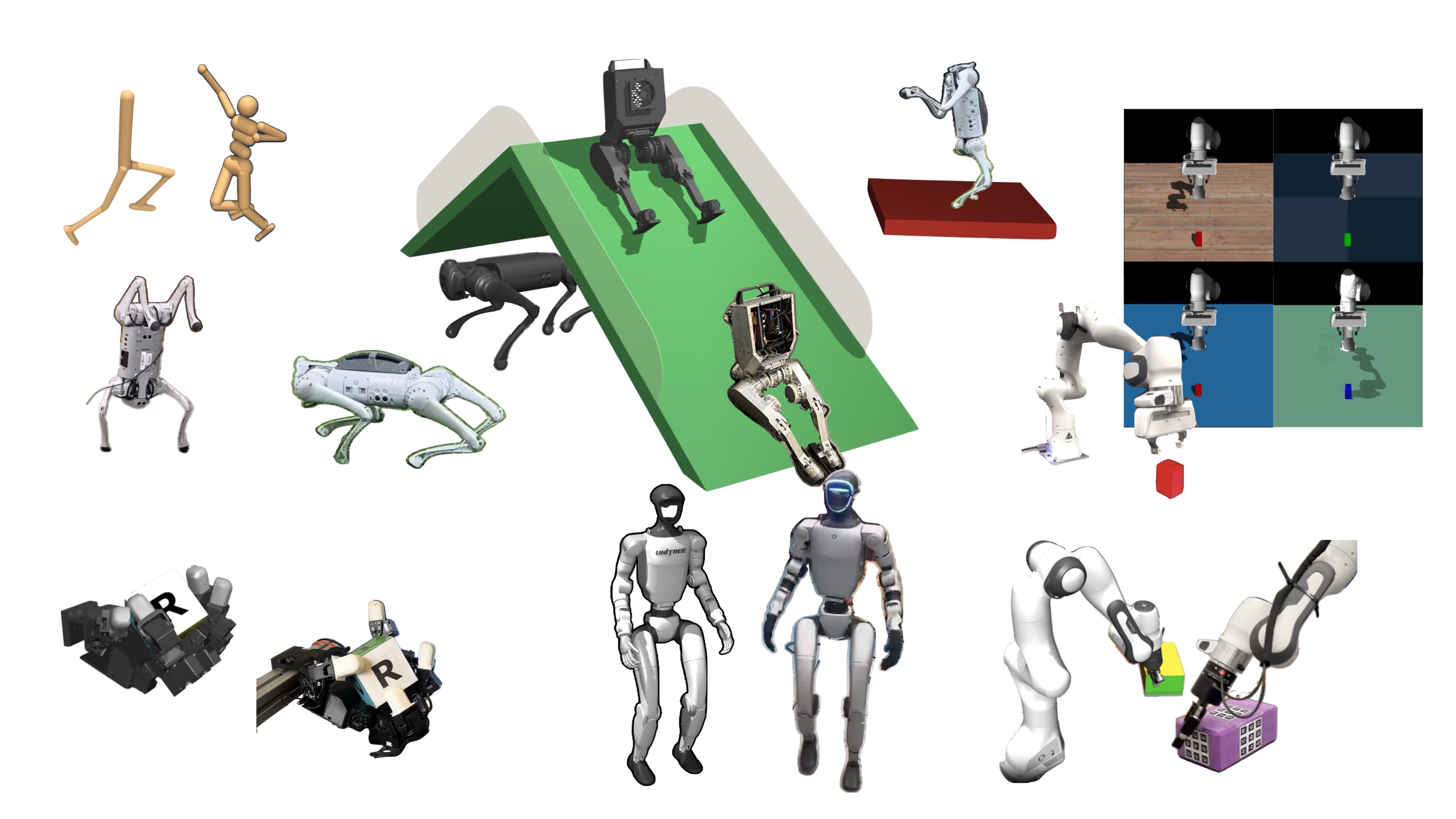
MuJoCo Playground ist ein vollständig quelloffenes Framework für das Roboterlernen, das mit MJX entwickelt wurde und die Simulation, das Training und den Sim-to-Real-Transfer vereinfacht. Mit einer einfachen Installation (pip install playground) können Forscher innerhalb weniger Minuten Richtlinien auf einer einzigen GPU trainieren. Es unterstützt verschiedene Roboterplattformen, darunter Vierbeiner, Humanoide, geschickte Hände und Roboterarme, und ermöglicht einen Zero-Shot-Sim-to-Real-Transfer von Zustands- und Pixeleingaben. Dies wird durch einen integrierten Stack erreicht, der aus einer Physik-Engine, einem Batch-Renderer und Trainingsumgebungen besteht. MuJoCo Playground ist ein Gemeinschaftsprojekt und soll Forschern und Entwicklern gleichermaßen wertvolle Dienste leisten.
Mehr lesen